Wir optimieren den Prozess der Werkzeugkonstruktion.
Wir konstruieren Folgeverbund- und Einzelwerkzeuge für Feeder bzw. Roboter und mechanisierte Fertigungsstraßen sowie Stufenwerkzeuge für vollautomatisierte Greifer/Saugerbalken-Fertigung. Unser Teilespektrum reicht von Strukturteilen über hochfeste Verstärkungsteile bis hin zu Außenhautteilen, zum Beispiel Dach, Frontklappen, Heckklappen, Türen und Seitenteilen.
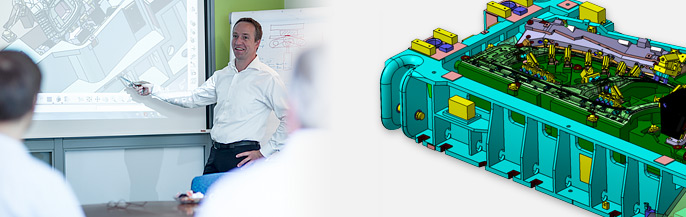
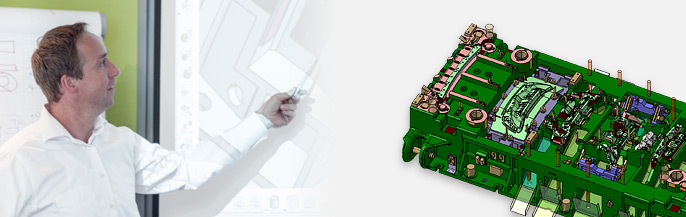
Wir entwickeln 3D-Konstruktionen von Ziehwerkzeugen, Formwerkzeugen, Schnittwerkzeugen und Folgeverbundwerkzeugen.
Die Bewegungsabläufe der Werkzeuge simulieren wir in CATIA V5.
Die kinematische Analyse ermöglicht uns die Feinabstimmung der Werkzeugeigenschaften und Prozessabläufe noch vor der Fertigstellung der Werkzeuge und ihrer tatsächlichen Erprobung. Auch hier werden durch die Simulation und durch die Vernetzung und Überlappung der Planungs- und Konstruktionsschritte Zeit und Kosten gespart.